Teď bych vás poprosil pokud byste mi mohli zkontrolovat tuto teorii:
Našel jsem si můstek L293D, datasheet zde: http://www.gme.cz/img/cache/doc/399/017/l293d-datasheet-1.pdf.
Kdybych nastavil na 1A a 1,2EN log.1, a na 2A log.0, můžu pak motor zapojit tak, jak je na schématu níže mezi ýstupy 1Y a 2Y? Točil by se? Směr otáčení bych pak udělal změnou na log.0 u 1A a log.1 na 2A. Je toto správně? (zaráží mě proč má dva piny na napájení a 4 země).
Stačí kousek překližky, na něj se serva snadno uchytí, kola se přišroubují na páky serv, nejjednodušší konstrukce jaká může být. Za hoďku je hotovo a jezdí. Jeden pin procesoru pro každé kolo. Stačí posílat pulsy.
Jde mi spíše o programování ježdění, moc nemusím techniku. Každopádně, to vypadá dobře, akorát přemýšlím, kolik by taková věcička mohla stát? (hledám hledám a namůžu najít, ale vypadá trochu draze, proto mám v záloze ty motory - editace: už jsem to našel, na mé poměry je to vskutku dost, i když chápu, co to dokáže, takže se bud porozhlídnu po něčem jiném nebo opět motory)
Předpokládám, že napájení by bylo řešeno, jen kablíky s pulzně šířkovou modulaci bych musel napojit z AVR čipu.
Někdo tu zmiňoval že bych servo musel vykuchat a upravit, zde ne?
Každopádně otázka s motory a čipem L293D stále trvá, ty původní co jsem posílal z GME jsou neskutečně malé, s tím bych nic neudělal, takže sháním jiné.
Děkuji za všechny tipy
Založen: Sep 28, 2005 Příspěvky: 1299 Bydliště: ZČ + JM
Zaslal: út říjen 15 2013, 20:32 Předmět:
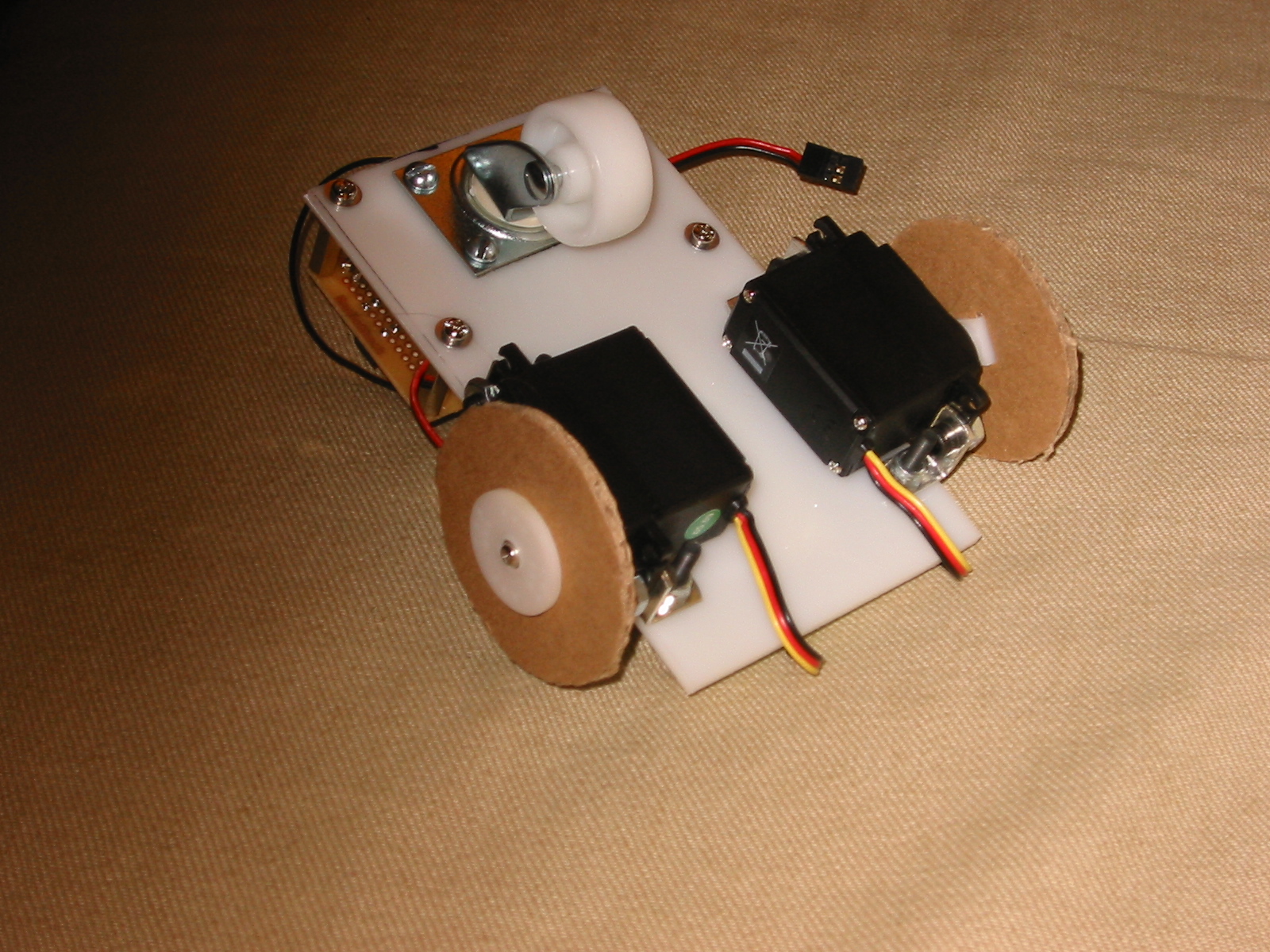
Ten odkaz byl jen pro inspiraci = tříkolový podvozek, dvě poháněná kola, jedno vlečené.
Vem kus překližky nebo plastu nebo jánevímcomáškdispozici šířky asi 10cm, délky asi 15cm, přilepíš nebo přišroubuješ nahoru 4 kousky dřeva aby k nim šly přišroubovat dvě serva, tak máš podvozek hotový. Kluzné "třetí kolo" může být třeba z půlky kindervejce přilepeného tavnou pistolí.
Servo má 4 dlouhé šrouby, rozebereš, jedno převodové kolo v servu má výstupek=doraz, ten ukrojíš nožem, převodové kolo zevnitř projedeš vrtákem aby neotáčelo vnitřním zpětnovazebním potenciometrem, do hřídele potenciometru uděláš drážku aby s ním šlo otáčet šroubovákem krz díru v převodovém kole a složíš to zpátky.
Servo má 3 dráty: zem, napájení 5V a povelový. V procesoru napíšeš jednoduchý program, který bude na jednom pinu dělat kladné pulzy délky 1,5ms s opakováním asi 50Hz, připojíš servu napájení 5V a povelový drát na pin procesoru a otáčením vnitřního potenciometru jej nastavíš aby servo stálo.
Servo reaguje na šířku pulsu v rozsahu cca 1ms až 2ms, kdy 1ms znamená maximální otáčky na jednu stranu, 2ms max, otáčky na druhou (1,5ms je střed=stop).
Pokud budeš posílat řekněme 1,6ms , pojede pomalu na jednu stranu.
V servu máš 3 v jednom: motor, převodovku i výkonovou část a navíc jednoduché ovládání na jednom pinu, to celé asi za stopade/servo.
Přesně tak jsem to myslel, takhle jako na vašem posledním obrázku. Toto je to čeho bych chtěl docílit , jen pár věcí k tomu, co jste mi o servech napsal:
Proč se vlastně ty serva takhle upravují? Ten smysl mi nějak uniká, omlouvám se jestli je to očividné, jen mi to nedochází. Mluvil jste o drážce. To proto aby se servo mohlo stále otáčet? Jinak co se týče těch pulzů mrknu se hned na video na youtube jak se s ním zachází s AVR a pak bych napsal kdyby mi něco nebylo jasné. Moc moc vám všem děkuji, uvidím jak budu pokračovat dál.
Stále studuji, ale mám jednu otázku. Když nastavím na servo pulzy o šířce 2ms, a dám to do cyklu while, bude se servo točit neustále? Připadá mi že ne, že podle toho co se nastavuje v tomto videu: http://www.youtube.com/watch?v=dmjvHvw3Rc8, se šířkou pulzů vlastně ovládá jen to, na jakou pozici se servo natočí, a ne o kolik se otočí, mám v tom maglajz, skoro usínám, ale chci to fakt pochopit . Tak jak to prosímvás je? Jak přinutit servo točit se neustále?
Založen: Sep 28, 2005 Příspěvky: 1299 Bydliště: ZČ + JM
Zaslal: st říjen 16 2013, 5:22 Předmět:
Servo bez úpravy má na posledním převodovém kole potenciometr, který vnitřní elektronika snímá jako polohu výstupní hřídele.
Tedy pulsy šířky 2ms nastaví servo do krajní polohy, 1ms do druhé na základě zpětné vazby od potenciometru.
Aby se servo točilo neustále jako motor, musí se
1. zrušit mechanické propojení potenciometru s posledním převodovým kolem
2. nastavit potenciometr na střed, aby při 1,5ms pulsech neměl snahu "dorovnávat" polohu (nebo nahradit potenciometr dvěma stejnými odpory)
Pokud necháš potenciometr, abys ho nemusel rozebírat pro nastavení nulové polohy je rozumné udělat si do hřídele drážku. Hřídel potenciometru je pak dostupná malým šroubovákem osou posledního převodového kola (výstupní hřídelí serva) a můžeš zvenčí dostavit potenciometr.
Takže jediné, co brání plynulému otáčení, je potenciometr, takže ten vyndám a nahradím třeba odpory, nastavím šířku pulzu 1,6ms a ono to servo, že nebude mít potenciometr, nebude vědět, že se má zastavit?
No každopádně ta část s rozebráním a upravením snad nebude tak složitá když je všude hromada návodů.
Založen: Sep 28, 2005 Příspěvky: 1299 Bydliště: ZČ + JM
Zaslal: st říjen 16 2013, 7:04 Předmět:
Servozesilovač uvnitř se snaží dorovnat odchylku skutečné polohy (potenciometr) od žádané polohy (vstupní pulsy).
U neupraveného serva otočí motorem, pohne se potenciometr, tím srovná odchylku, stojí.
U upraveného serva otočí motorem, ale odchylka tam je pořád, takže se ji snaží dorovnat = točí se pořád (tedy pokud kromě potenciometru odstraníš i mechanický doraz - výstupek)
Tak si asi koupím dvě serva odsud: http://www.snailshop.cz/179-vigor, a pak si ještě budu muset sehnat dvě kola na ně, po těch se porozhlídnu. Serva upravím, doufám že úspěšně, a pak vyzkouším v praxi, když už snad teorii chápu.
Ještě jedna věc - když nastavím šířku pulsu 1,2ms, pojede servo pomaleji než se šířkou pulsu 1,4ms? Nebo to není o rychlosti, ale čistě jen o úhlu natočení?
Tak podle toho co jsem si přečetl je to na napájení. Ale přemýšlím jak napájet. 4 1,5V baterie by snad mohly být, ale to bych získal to maximum napájecího napětí a nechci to nějak přetěžovat, snad by se tam šikl stabilizátor na 5V.
Mohl bych vyřešit napájení tak, že bych dvě serva napájel paralelně 6V, a na to samé napájení bych napojil stabilizátor 5V, abych napájel AVR čip? Doufám že to zní srozumitelně. Já si nejsem totiž jistý jestli se napájení dá řešit "dlouhou" řadou paralelních zapojení. Ale moc vám děkuji, doufám že to bude fungovat.
Časy uváděny v GMT + 1 hodina Jdi na stránku Předchozí1, 2, 3Další
Strana 2 z 3
Nemůžete odesílat nové téma do tohoto fóra. Nemůžete odpovídat na témata v tomto fóru. Nemůžete upravovat své příspěvky v tomto fóru. Nemůžete mazat své příspěvky v tomto fóru. Nemůžete hlasovat v tomto fóru. Nemůžete připojovat soubory k příspěvkům Můžete stahovat a prohlížet přiložené soubory
Informace na portálu Elektro bastlírny jsou prezentovány za účelem vzdělání čtenářů a rozšíření zájmu o elektroniku. Autoři článků na serveru neberou žádnou zodpovědnost za škody vzniklé těmito zapojeními. Rovněž neberou žádnou odpovědnost za případnou újmu na zdraví vzniklou úrazem elektrickým proudem. Autoři a správci těchto stránek nepřejímají záruku za správnost zveřejněných materiálů. Předkládané informace a zapojení jsou zveřejněny bez ohledu na případné patenty třetích osob. Nároky na odškodnění na základě změn, chyb nebo vynechání jsou zásadně vyloučeny. Všechny registrované nebo jiné obchodní známky zde použité jsou majetkem jejich vlastníků. Uvedením nejsou zpochybněna z toho vyplývající vlastnická práva. Použití konstrukcí v rozporu se zákonem je přísně zakázáno. Vzhledem k tomu, že původ předkládaných materiálů nelze žádným způsobem dohledat, nelze je použít pro komerční účely! Tento nekomerční server nemá z uvedených zapojení či konstrukcí žádný zisk. Nezodpovídáme za pravost předkládaných materiálů třetími osobami a jejich původ. V případě, že zjistíte porušení autorského práva či jiné nesrovnalosti, kontaktujte administrátory na diskuzním fóru EB.